
3DSS™ Bathymetry Engine
The 3DSS MBES Bathymetry Engine uses an advanced seabed detection algorithm to provide accurate, wide swath bathymetry using the dual head nature of the 3DSS sonar and its high resolution 3D imaging capability. The MBES Engine produces bathymetric soundings equivalent to an ideal multibeam sonar without the sidelobes, beam spreading, or asymmetrical beam sensitivity inherent in traditional beamsteering systems. With useable swath widths exceeding 12-16 times water depth, the 3DSS more than triples swath coverage of traditional MBES systems in water shallower than 20m and more than quadruples coverage in water depths less than 10m. The 3DSS MBES Engine provides user control of beamw geometry with beamwidths as narrow as 0.25°, beam densities to 1024 beams, and swath sector angles as wide as 220°. Soundings can be organized as equidistant, or equiangle, or in a new hybrid mode that offers wide swath equidistant spacing while also ensuring full vertical coverage with no blind zones over the entire swath.

3DSS™ Bathymetry Processing
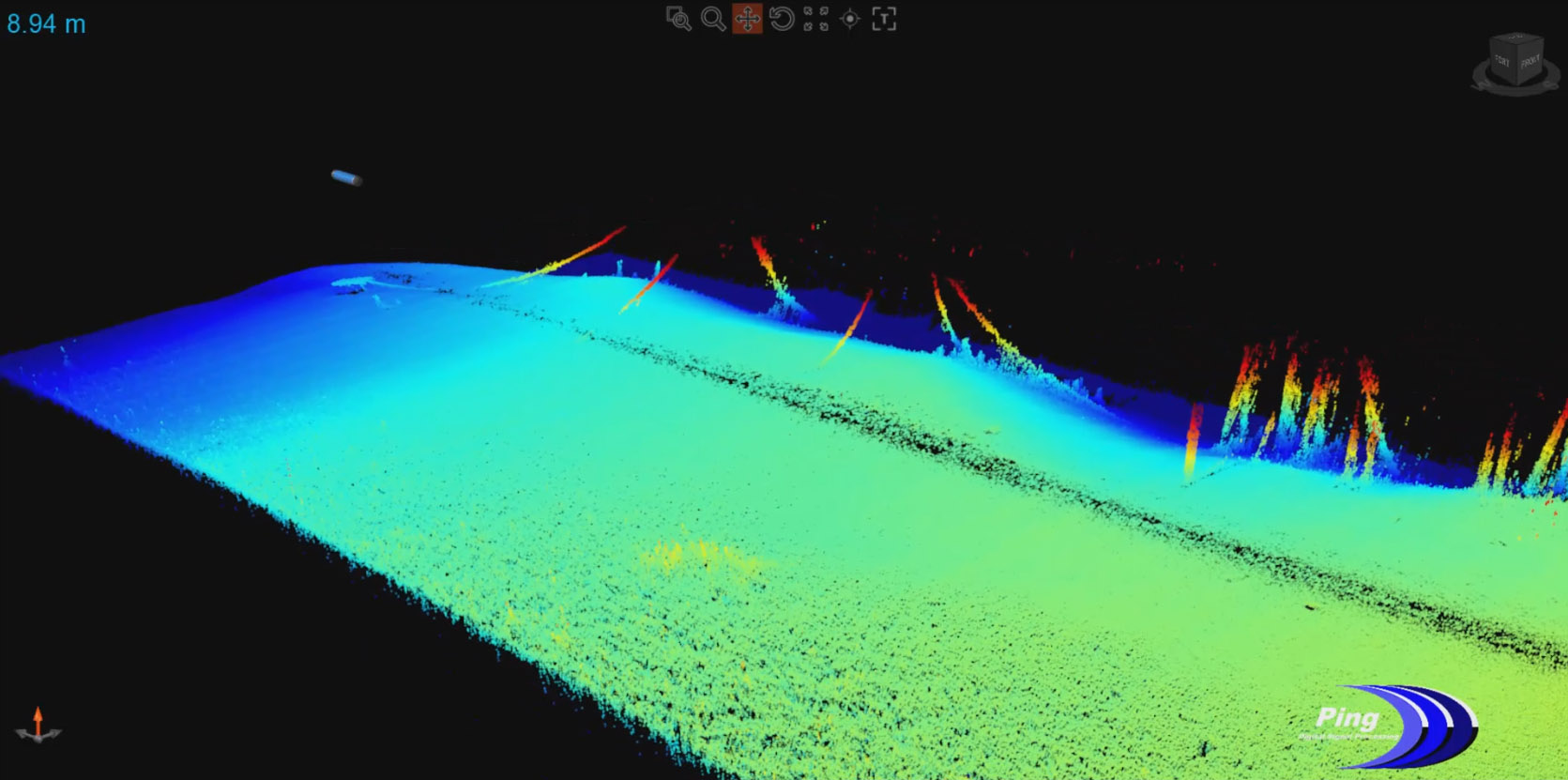
The 3DSS™ employs patented Computed Angle-of-Arrival Transient Imaging (CAATI) to provide low variance swath bathymetry. This technology takes advantage of multi-channel phased transducer arrays developed in house, along with proprietary signal processing methodologies to resolve multiple simultaneous backscatter arrivals in real time. This technique provides high sounding densities and 3D imagery in addition to bathymetric data.
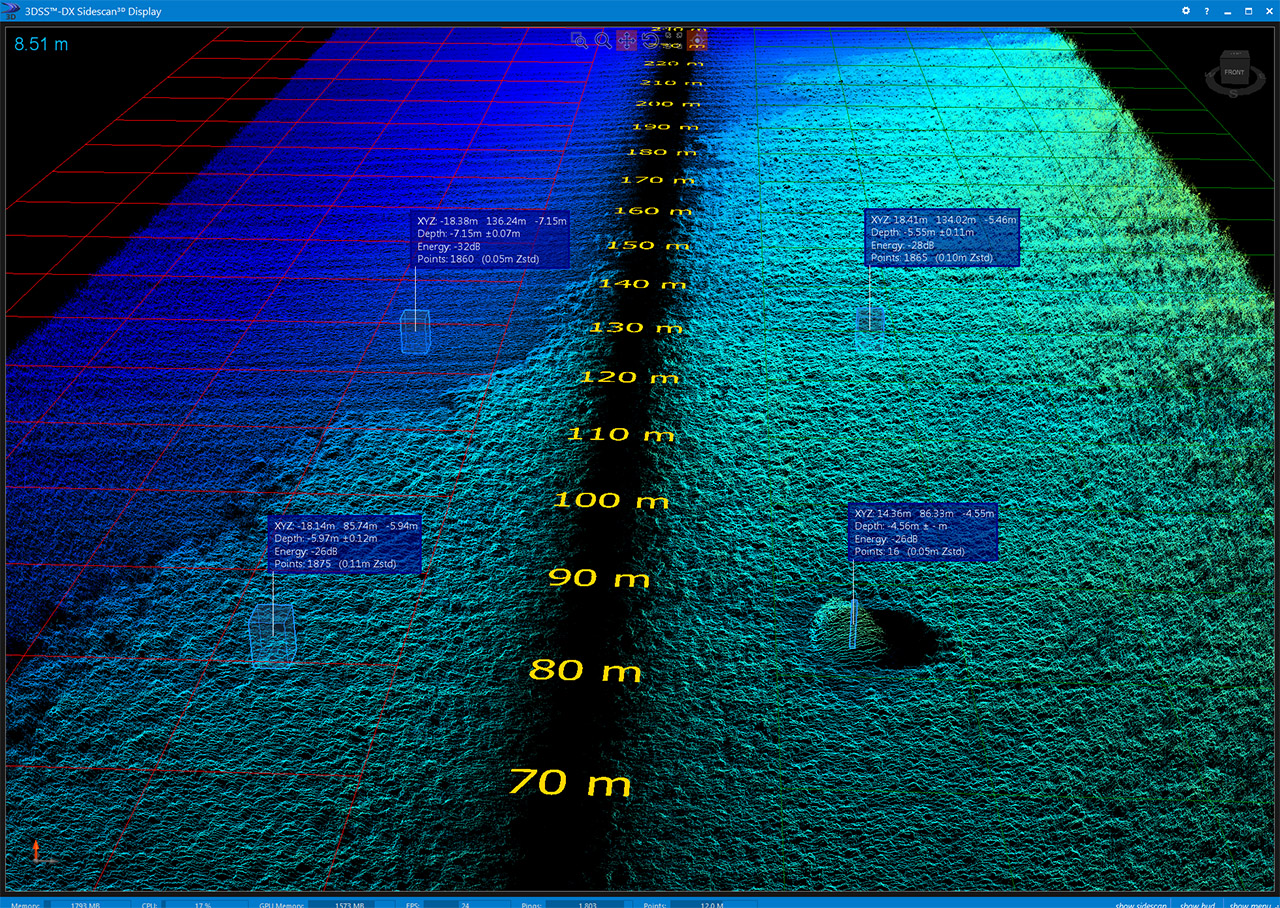
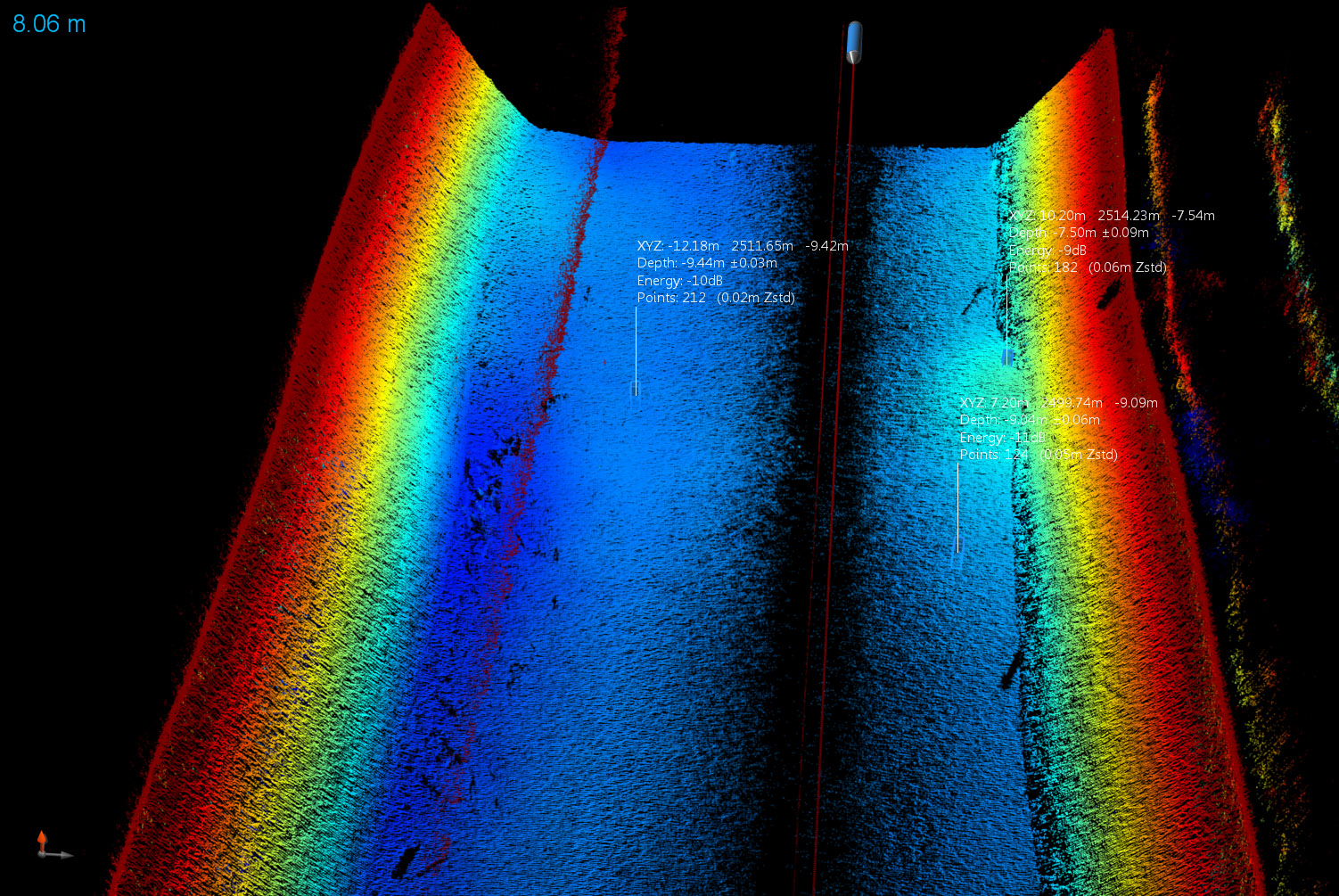
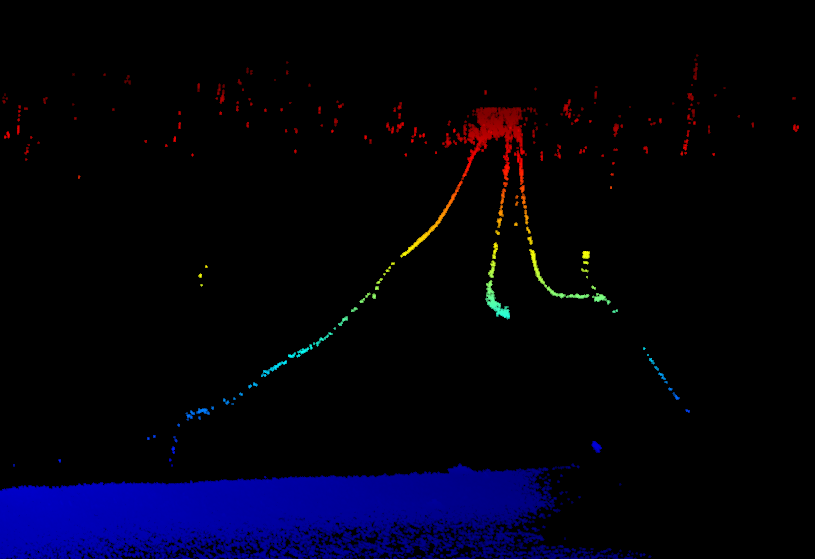
Pulse Footprint Sounding
At each instant in time after the 3DSS sonar pulse is tranmitted, backscatter echoes from the instantaneous pulse footprint(s) are resolved in angle, range and amplitude. A display showing the raw backscatter locations for each ping provides a single profile of a 3D acoustic image of the underwater environment including the seabed, objects in the water-column, the sea surface and even multipath. The backscatter from pulse footprints on the seabed are separated using a proprietary detecton algorithm and are called "Pulse Footprint Soundings". In comparison with conventional beam based soundings, pulse footprint soundings have several advantages including; well defined boundaries without beam sidelobes, symmetric weighting across the sounding footprint and one sample per sounding.
Multiple simultaneous pulse footprint soundings are accommodated using the CAATI algorithm (note that this is not possible using interferometry or phase differencing methods). The density of pulse footprint soundings increases as the grazing angle decreases and also with increasing complexity of features on the seabed.


3DSS™ Bathymetry Processing
The 3DSS™ MBES Engine uses the fine scale pulse footprint soundings to compute equivalent MBES Soundings without MBES beam footprint limitations such as sidelobes, asymmetric backscatter contributions across the footprint and ambiguous range samples per footprint. Soundings for each beam are computed from the high density pulse footprint soundings. Beam characteristics are identical at each beam angle with ideal, symmetric beam patterns, well defined boundaries and no sidelobes.

3DSS™ MBES Bathymetry Mode operation provides:
- User specified beam settings; NBeams, θBeam, θSector.
- Identical beam geometries with well-defined boundaries, uniform weighting and no sidelobes.
- Wide range of MBES configurations (e.g. 1°, 512 beams) and including statistically independent (i.e. non-overlapping) beam geometries.
- Accurate bathymetry with full vertical coverage over a very wide swath.
- Direct comparison with with bathymetry from conventional Multibeam systems.