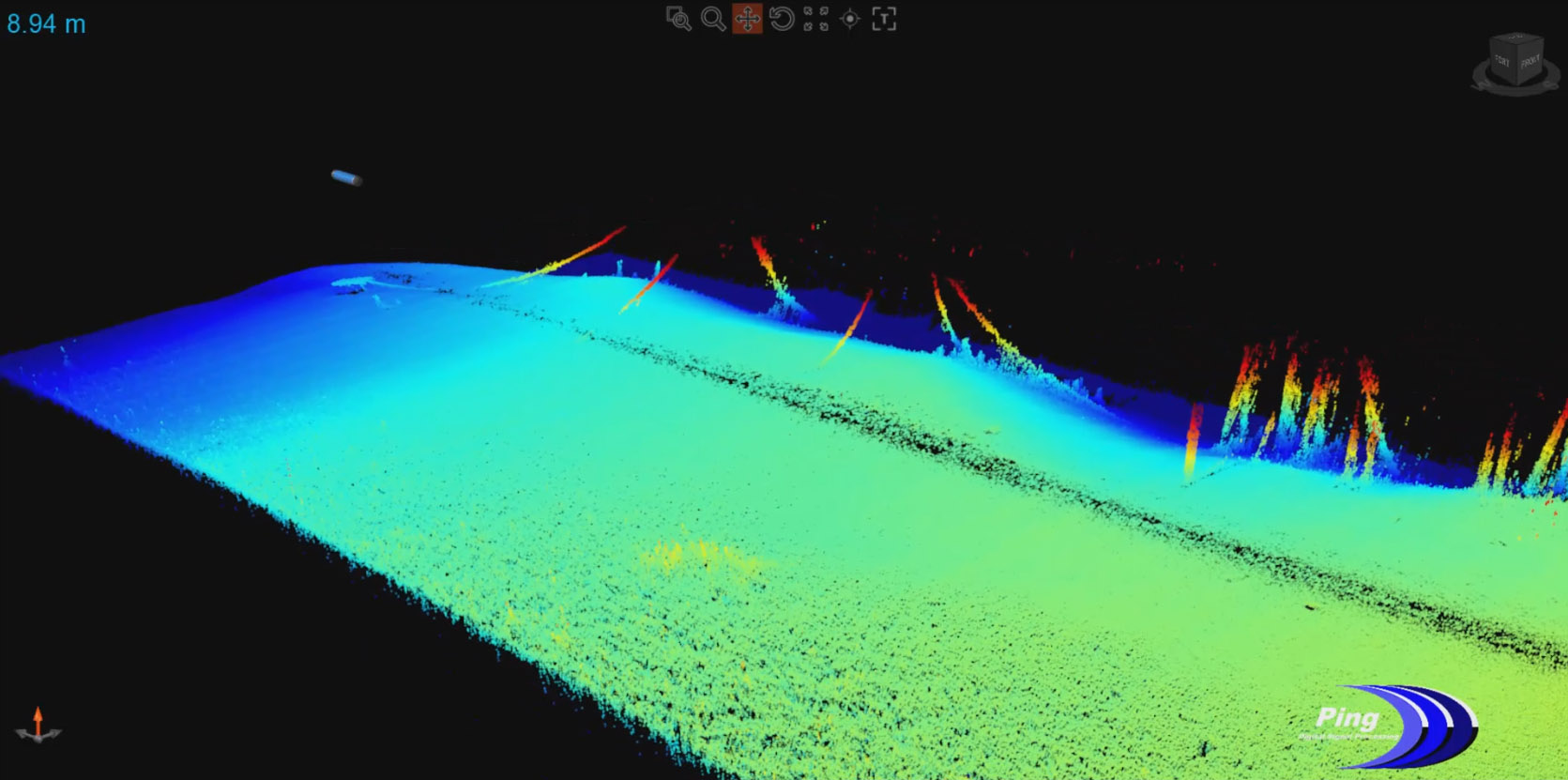

True 3-D Sidescan
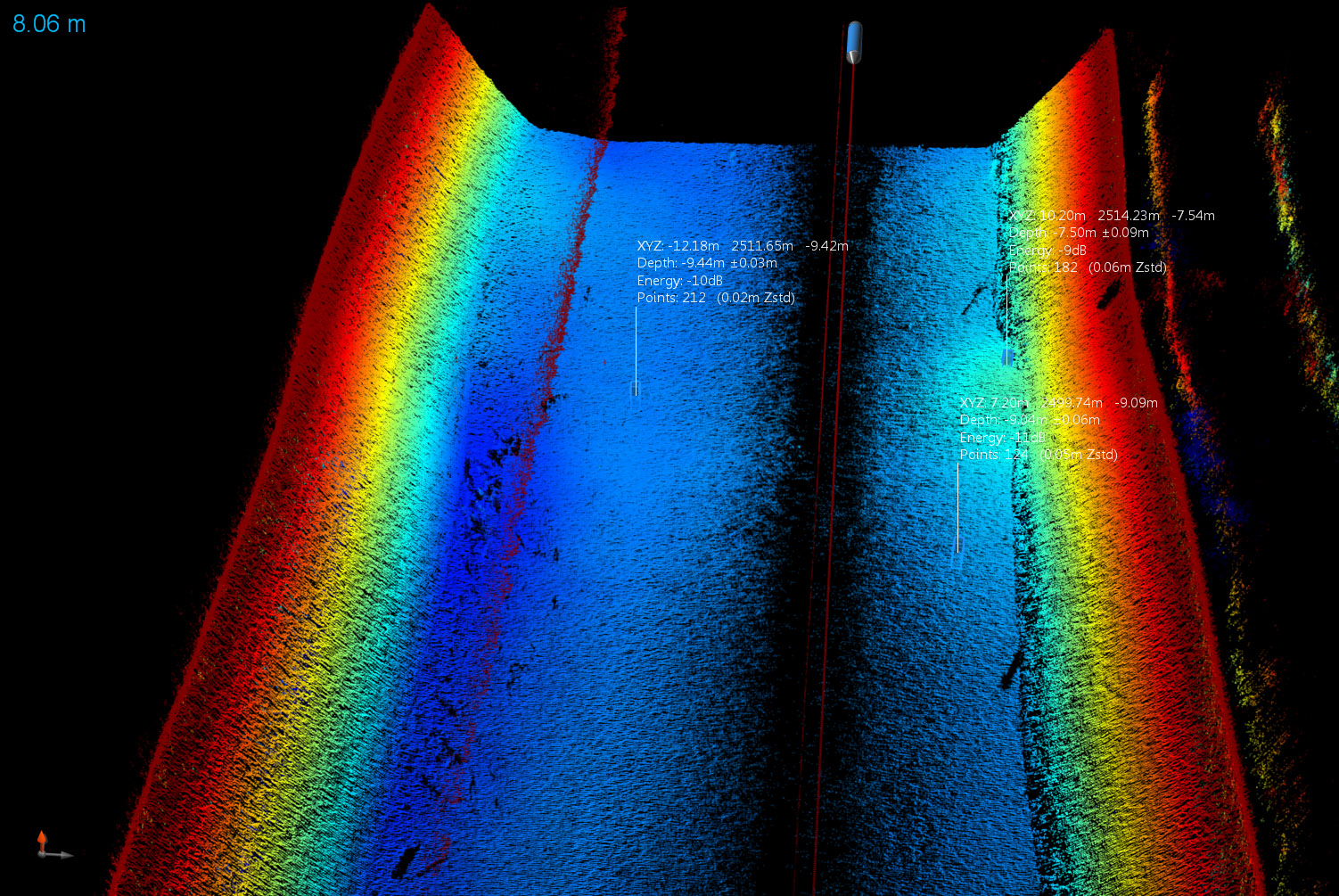
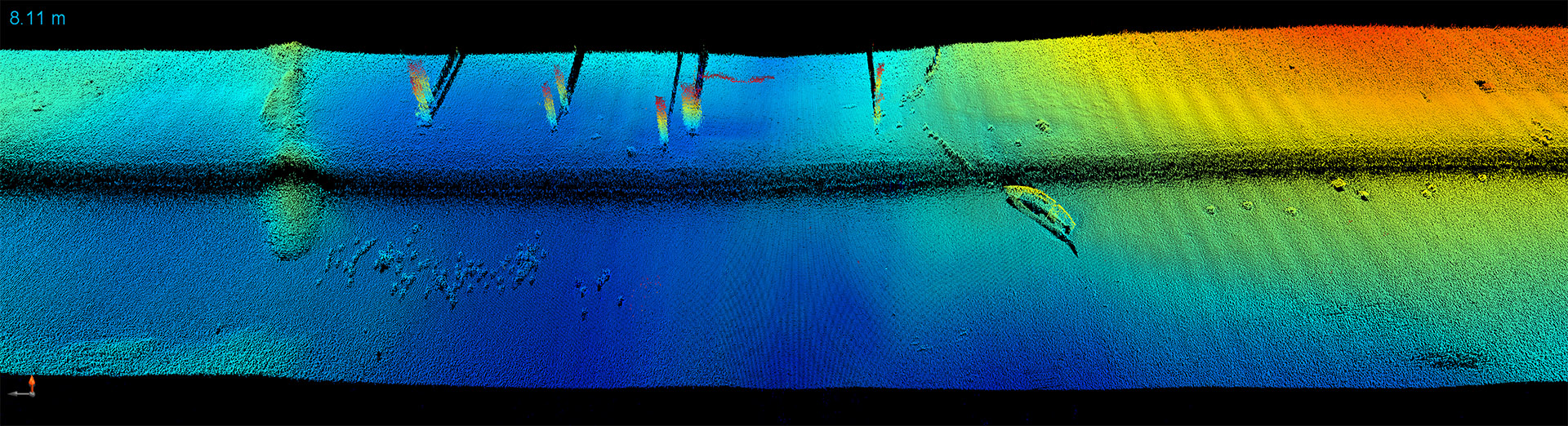
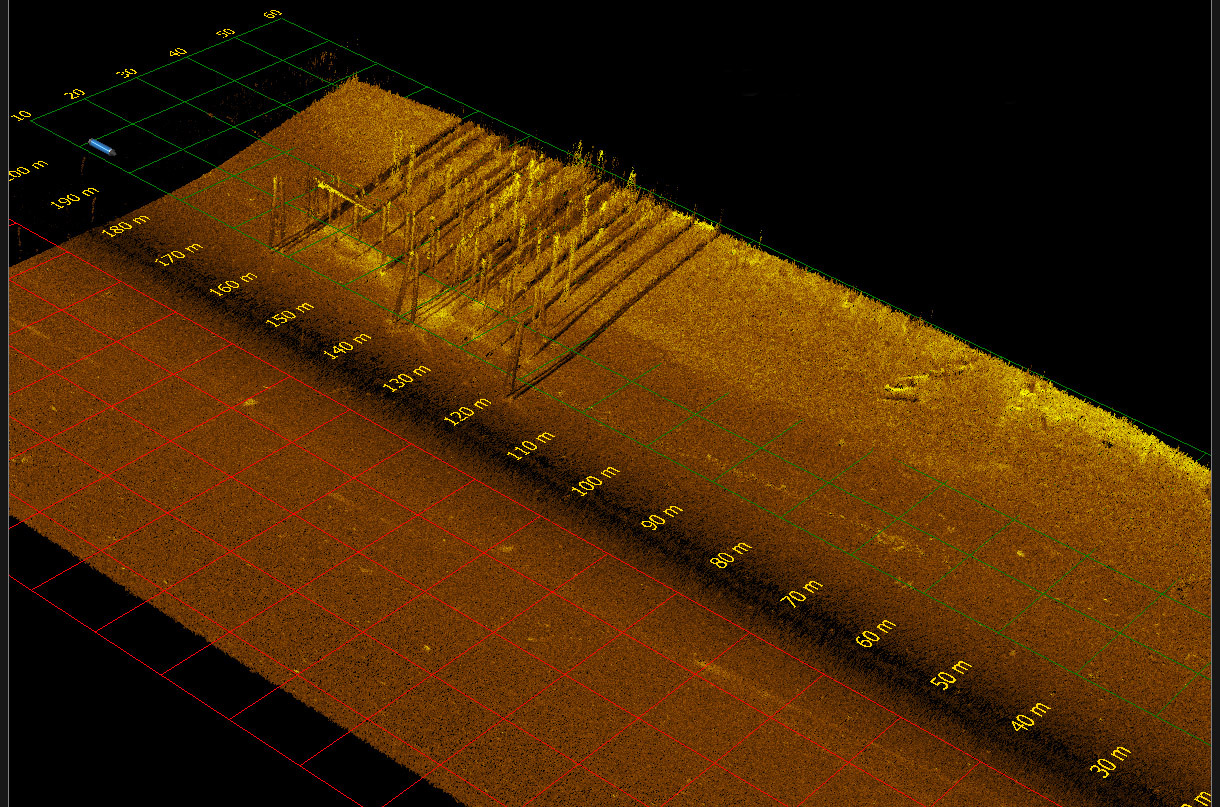
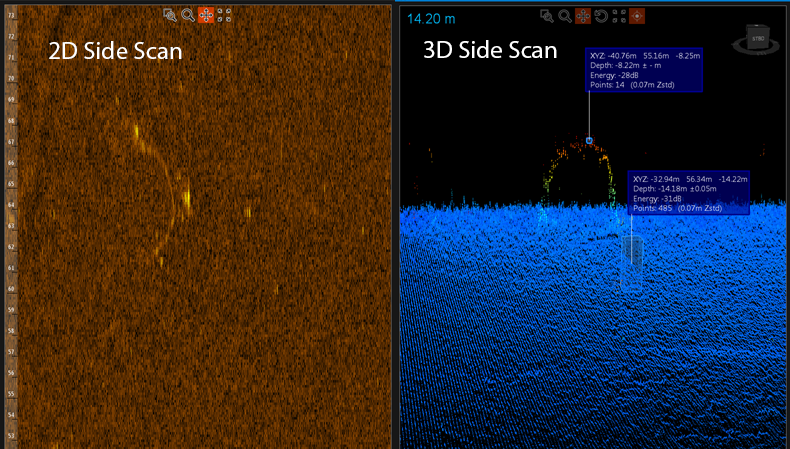
Utilizing the CAATI methedology, each backscatter arrival is given a range and angle value relative to the sonar head. These raw data points can then be visualized in a point cloud display, resulting in a geometrically correct 3D representation of a standard 2D side scan image. This point cloud can be rotated and manipulated to provide 3D views of object geometry in side scan imaging detail. This greatly enhances the capability for detection and identification of targets, and allows for easy measurement of target dimensions. Tools for displaying the 3D point cloud and measuring target dimensions are included in PingDSP's software suite.
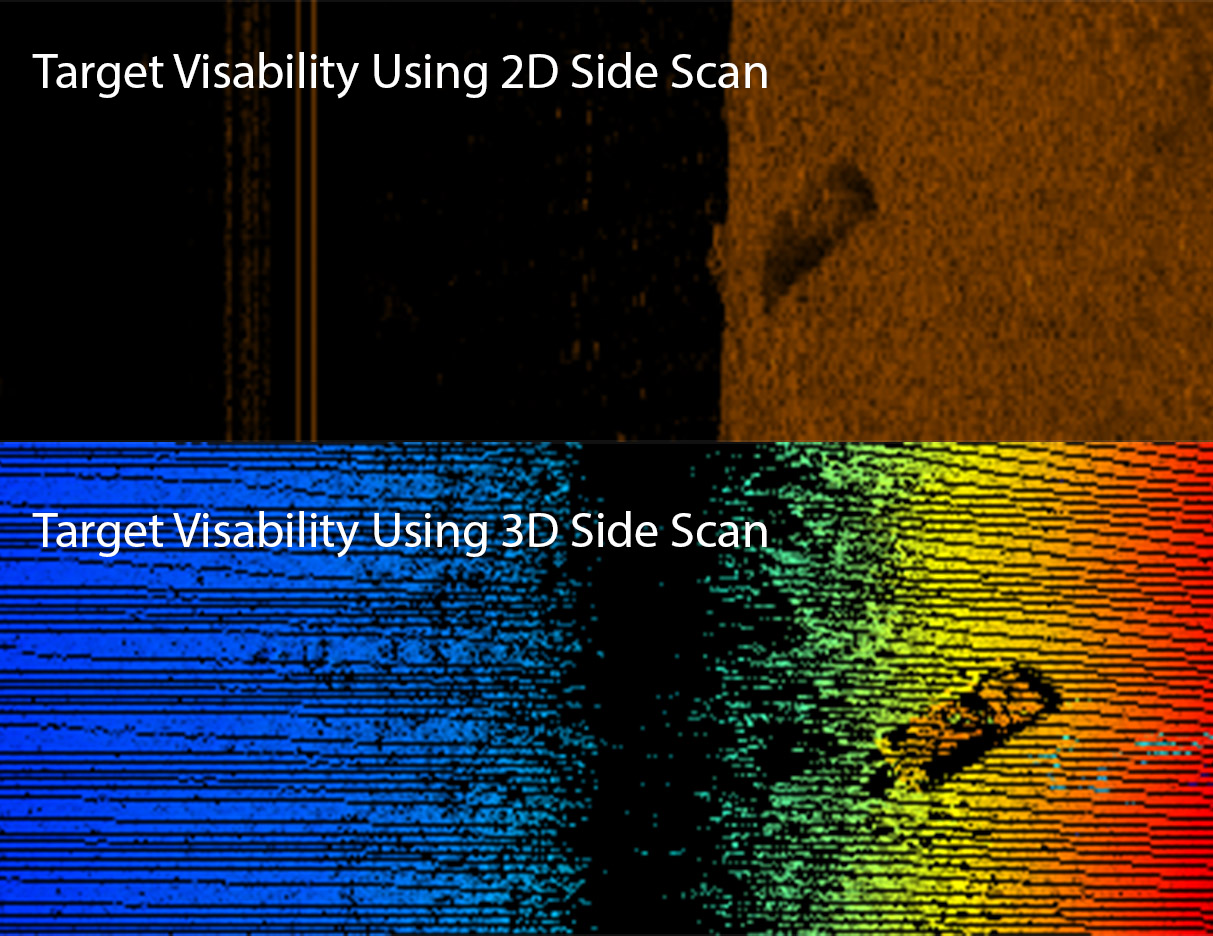
To the left is a target of interest in both traditional and 3D side scan views. With the ability to colorize and rotate the 3D perspective, the true structure of the target is easily revealed.
Softsonar ™
At the heart of the 3DSS-DX sonar is Ping DSP’s state-of-the-art SoftSonar ™ electronics technology. The 3DSS-DX integrates low noise, high dynamic range receivers with steerable transmitters, and specially designed transducers to provide a high signal-to-noise ratio and maximum sonar performance in all conditions. Completed with a versatile Gigabit Ethernet interface, a modular high-speed digital signal processing architecture, and packaged with an easy to use software GUI, 3D Display, and integrated support for 3rd party hydrographic survey hardware and software; the 3DSS makes for a high quality and capable sonar platform ideally suited for a variety of applications.
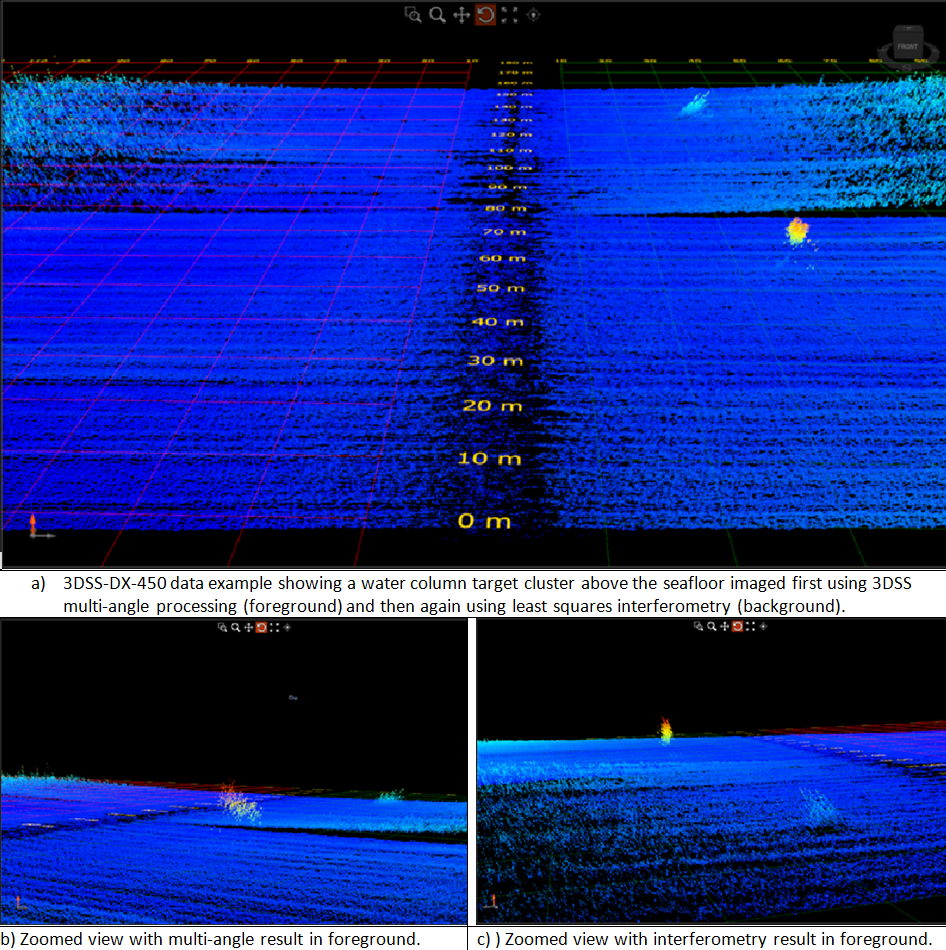
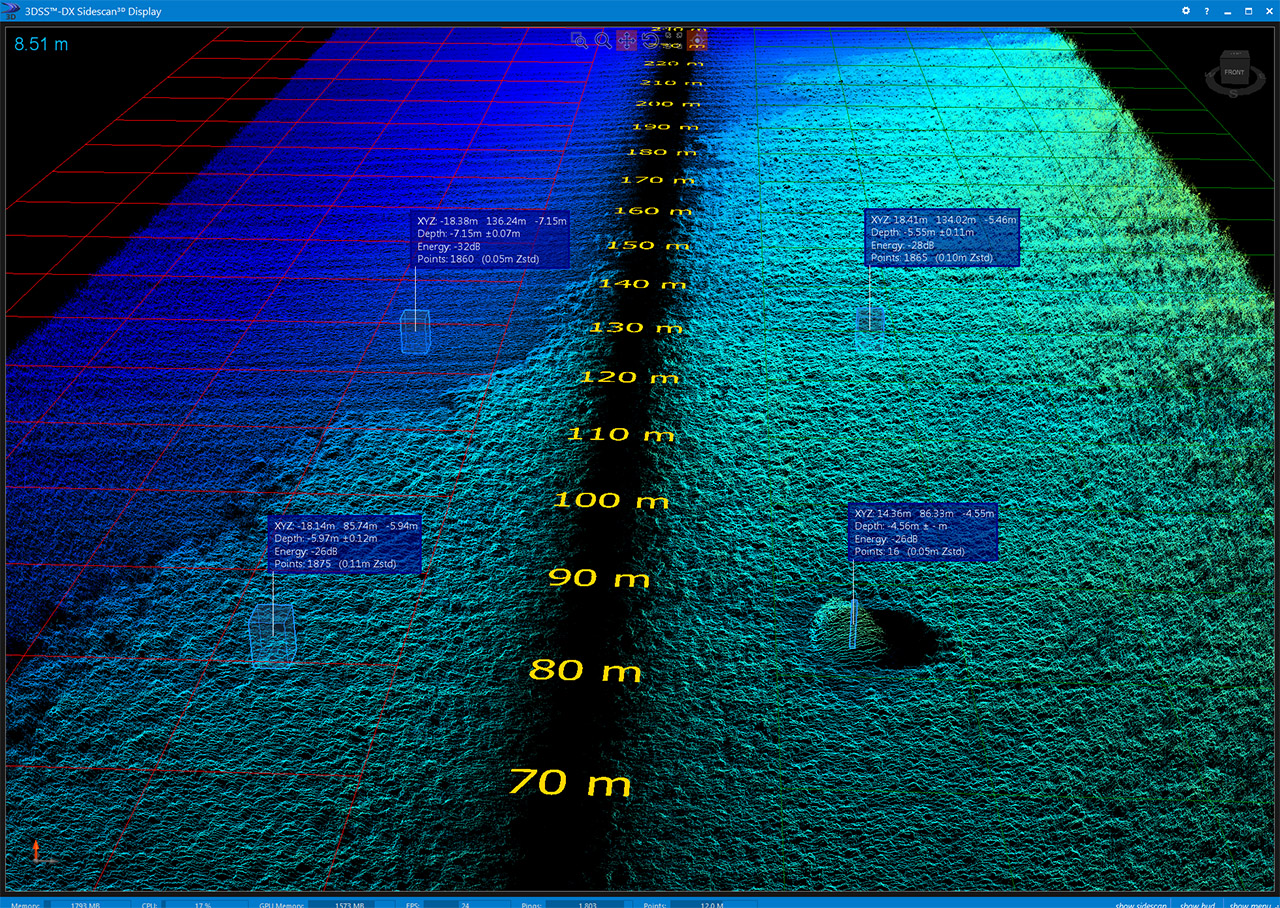
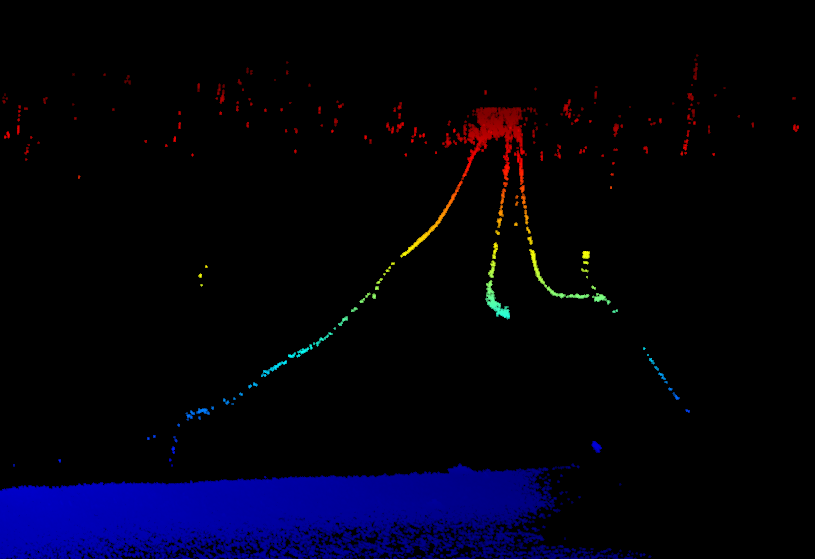
This 3DSS-DX-450 data example shows bathymetry results for a water-column target cluster above the seafloor (28m average depth). The data is displayed twice, first with processing using the 3DSS patented Computed Angle-of-Arrival Transient Imaging (CAATI) methodology (foreground target cluster) and then again using least squares interferometry (background target cluster).
The target cluster is separated from the seafloor using CAATI to resolve multiple simultaneous angles-of-arrival (e.g. from the seafloor and water-column targets). In comparison, least squares interferometry incorrectly merges the water-column target cluster with the seafloor and introduces a bathymetric artifact.
The variability of the bathymetry is also reduced using CAATI as a result of the inherent separation of seafloor backscatter arrivals and concurrent multipath interference.