
CAATI ™
The 3DSS Sidescan Sonar employs patented Computed Angle-of-Arrival Transient Imaging (CAATI) to overcome many of the limitations inherient to traditional interferometric systems.
This technology takes advantage of multi-channel phased transducer arrays developed in house, along with proprietary signal processing methodologies to resolve multiple simultaneous backscatter arrivals in real time. This technique dramatically reduces multipath interference which is a limiting factor in the performance of traditional interferometric systems. This also allows for water column targets to be resolved independent of seafloor backscatter and is integral in producing true 3D sidescan imagery and bathymetry complient with the highest IHO and CHS specifications.
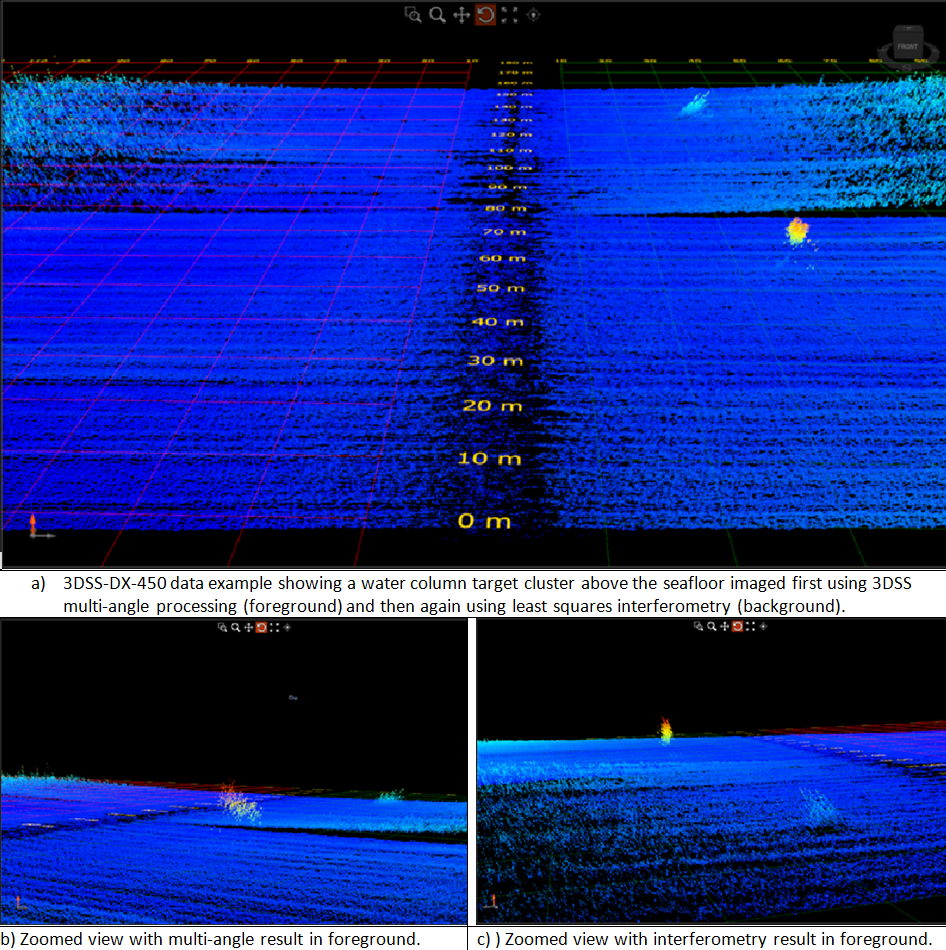
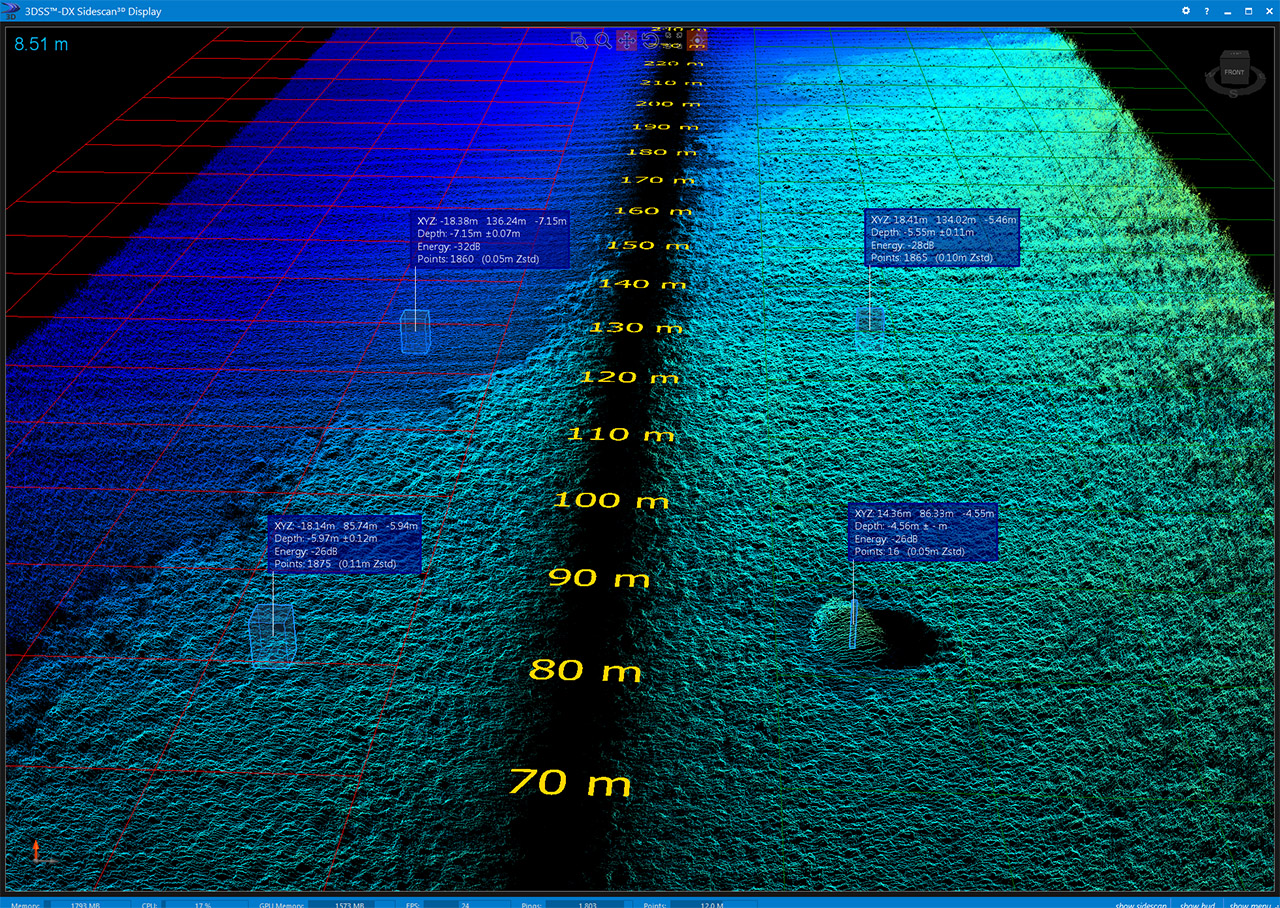
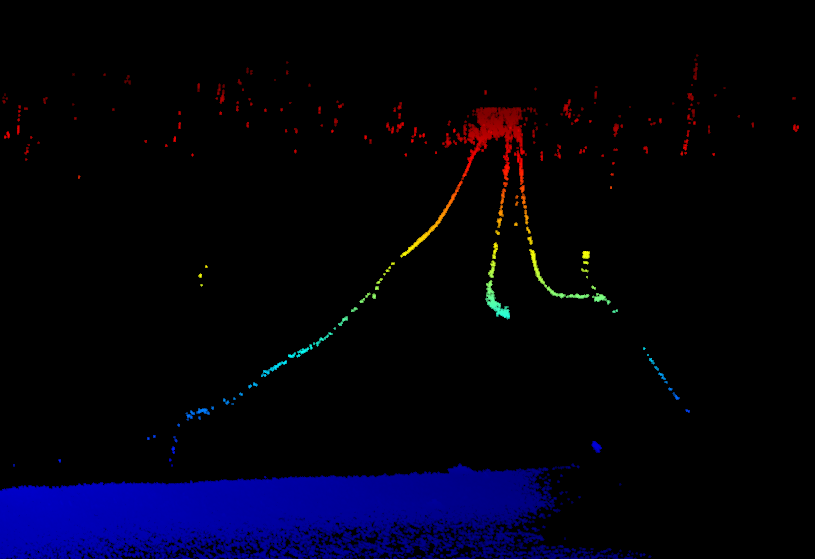
This 3DSS data example shows bathymetry results for a water-column target cluster above the seafloor (28m average depth). The data is displayed twice, first with processing using the 3DSS patented Computed Angle-of-Arrival Transient Imaging (CAATI) methodology (foreground target cluster) and then again using least squares interferometry (background target cluster).
The target cluster is separated from the seafloor using CAATI to resolve multiple simultaneous angles-of-arrival (e.g. from the seafloor and water-column targets). In comparison, least squares interferometry incorrectly merges the water-column target cluster with the seafloor and introduces a bathymetric artifact.
The variability of the bathymetry is also reduced using CAATI as a result of the inherent separation of seafloor backscatter arrivals and concurrent multipath interference.
Sounding Density and Angular Resolution
Application example showing the achievable cross-track sounding density (independent depth measurements) and angular resolution (i.e. equivalent cross-track beamwidth) as a function of cross-track distance for an individual 3DSS sonar ping at an operating altitude of 10m above a flat seafloor.
In the example, sounding density is smallest near nadir. At a cross-track distance of approximately 2.5m (1/4 of the sonar altitude) the sounding density is approximately 15 soundings/meter and the associated angular resolution is approximately 0.4 degrees. At larger cross-track distances the sounding density quickly improves to more than 35 soundings/meter and an angular resolution of less than 0.1 degrees.
In comparison with multibeam echo sounders, 3DSS soundings are each derived from an individual range sample rather than multiple range samples within a beam. For a specified cross-track grid resolution, averaging over the high 3DSS sounding density provides depth uncertainty benefits analagous to the benefits of the multiple range samples but coarse sounding density of beamformed echo sounders. The difference is that the swath coverage for the 3DSS sonar is not limited by the echo sounder beamwidth and is only governed by the uncertainty specification within each grid cell. Multibeam results are also limited by the same uncertainty specification, however a 1 degree multibeam echo sounder operating at 10m altitude, for example, can only achieve 0.5m grid cell resolution for a total swath widths of 2.8 times the sonar altitude, while the 3DSS sonar achieves up to 14 times altitude.