
Shallow Water Hydrography

- 3DSS-DX-450 (dual transducer, 450kHz)
- Over-the-side pole mount, 27' boat
- Approximately 1m below surface
- 3DSS-DX Control Application (Ping DSP Inc.)
- HIPS and SIPS Hydrogrpahic Software (Teledyne Caris Inc.)
Application Overview
The 3DSS sonar employs patented Computed Angle-of-Arrival Transient Imaging technology (CAATI) to provide high accuracy, wide swath echo sounding together with co-registered geometrically correct high resolution 3D and 2D imagery.
3DSS technology supplements multibeam echo sounders (MBES) in shallow water by providing wider coverage together with 3D imagery. 3DSS technology also supercedes interferometric phase based sonars by separating seabed returns from sea surface, water column and multipath interference to provide clean and accurate bathymetry together with stunning 3D and 2D imagery.
For shallow water hydrography, the 3DSS Sonar is simply the best and most versatile mapping and imaging sonar available.
MBES Engine
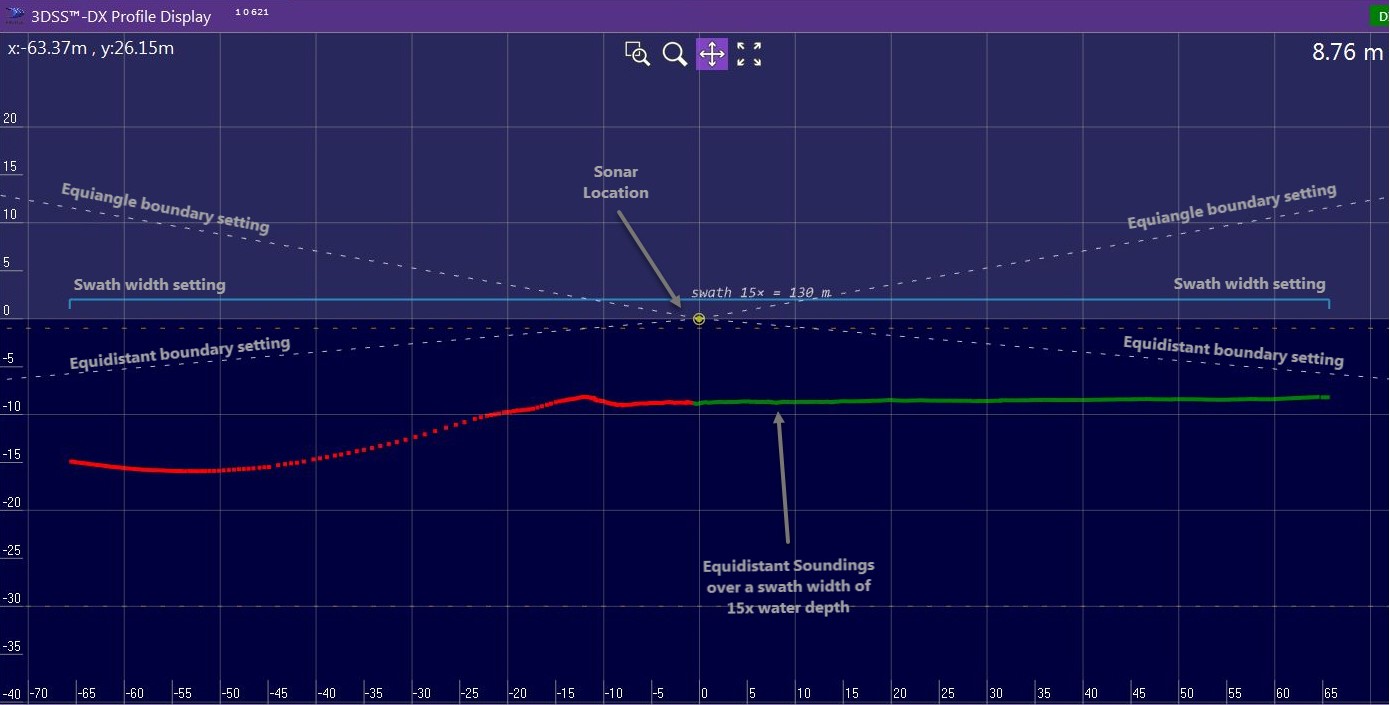
The 3DSS sonar includes a Multibeam Echo Sounder (MBES) bathymetry processing engine that allows the user to specify the beamwidth, the number of beams, and the coverage sector. Beams can also be orgainized as equidistant or equiangle or in a new hybrid mode for cases where an equidistant sounding spacing is desired, but full water-column coverage is also desired. The MBES engine also incorporates a sophisticated detection algorithm that takes full advantage of the high resolution 3DSS image data to provide highly accurate soundings within each beam.
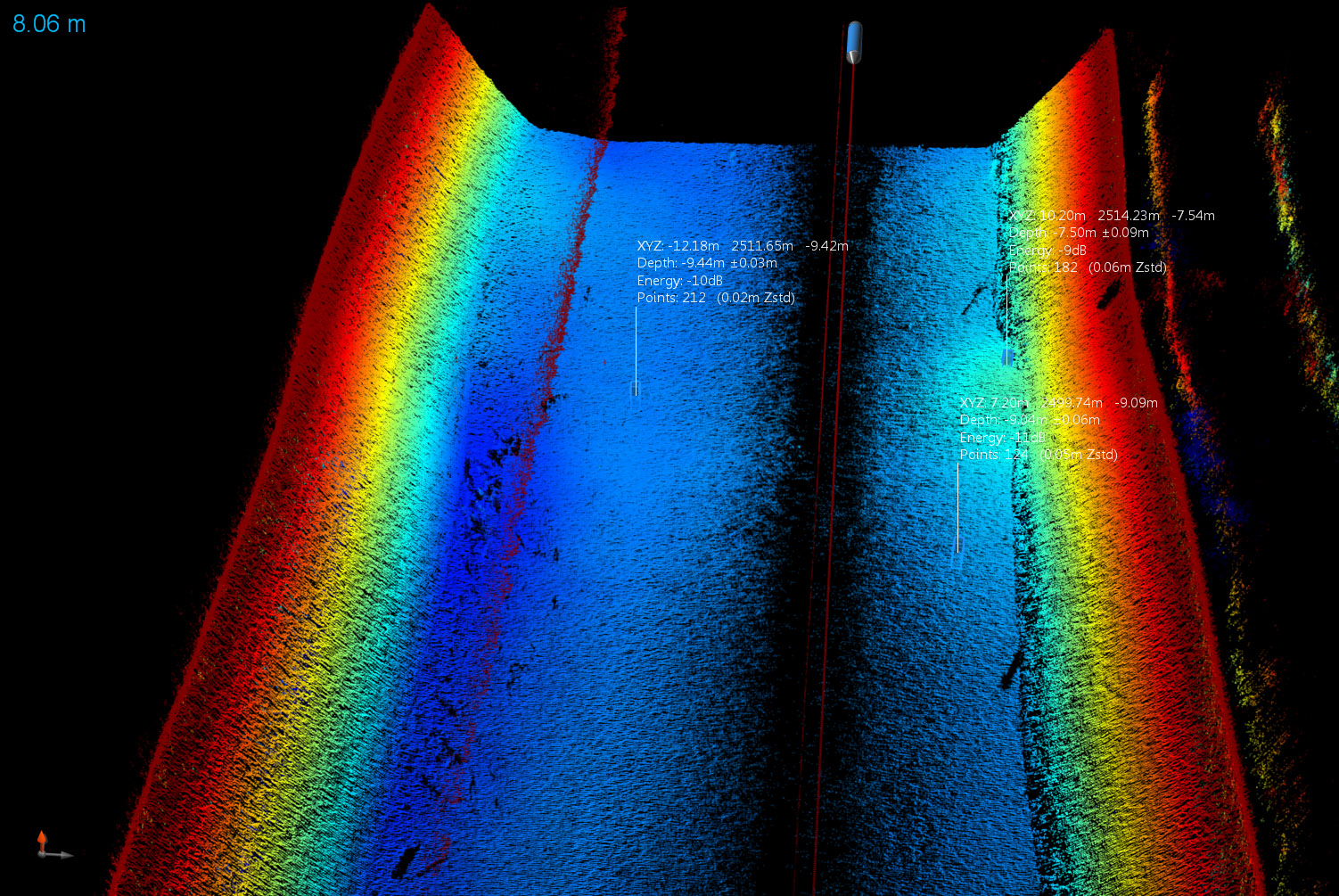
Operation in Very Shallow Water

The 3DSS-DX-450 is able to operate in water depths as shallow as 0.75m. And while the performance of other sonars degrades in this envoronment due to the increasing strength and complexity of the multipath environment, this is not the case for the 3DSS-DX-450. In very shallow water,the achievable bathymetric swath width with the 3DSS sonar, relative to depth, actually increases.
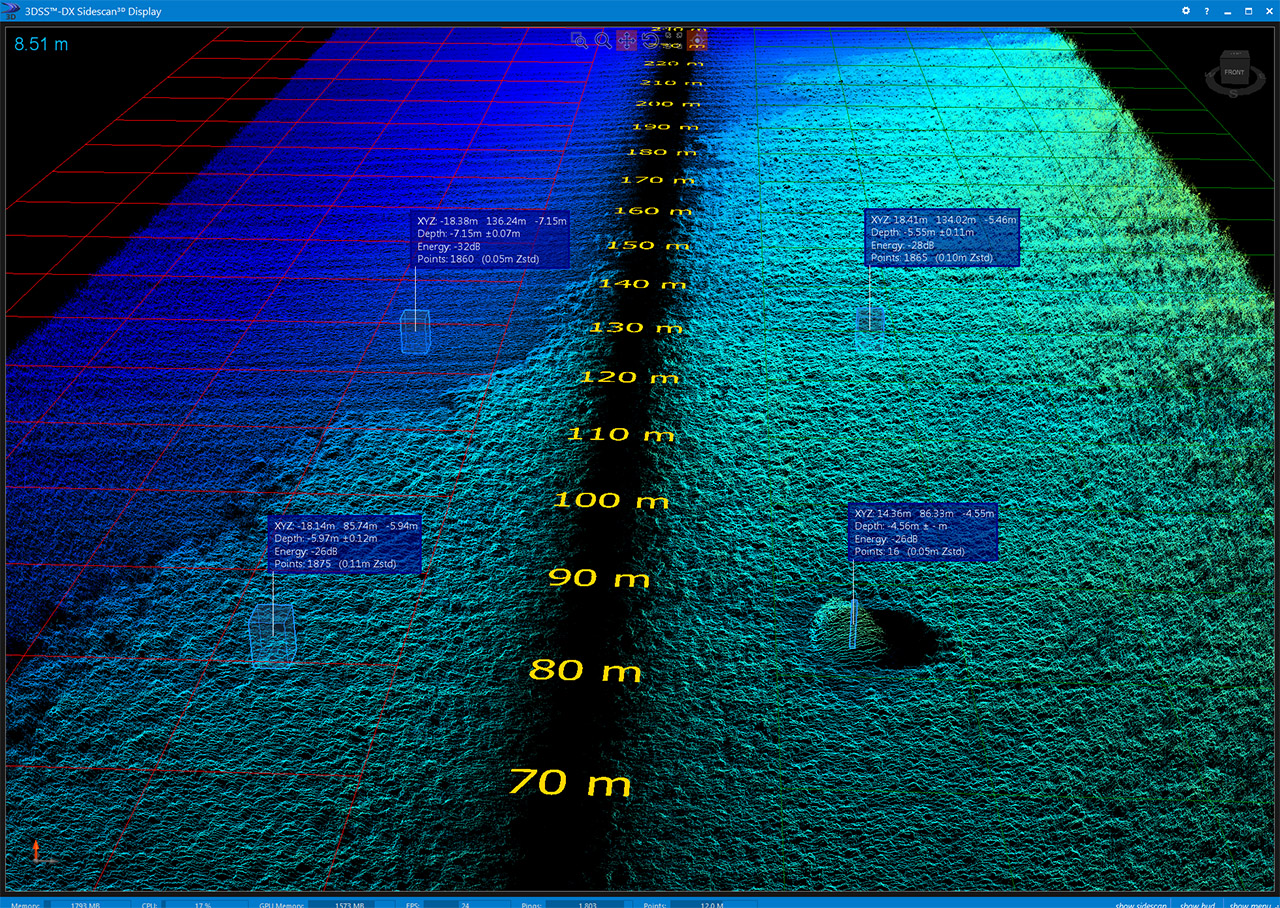
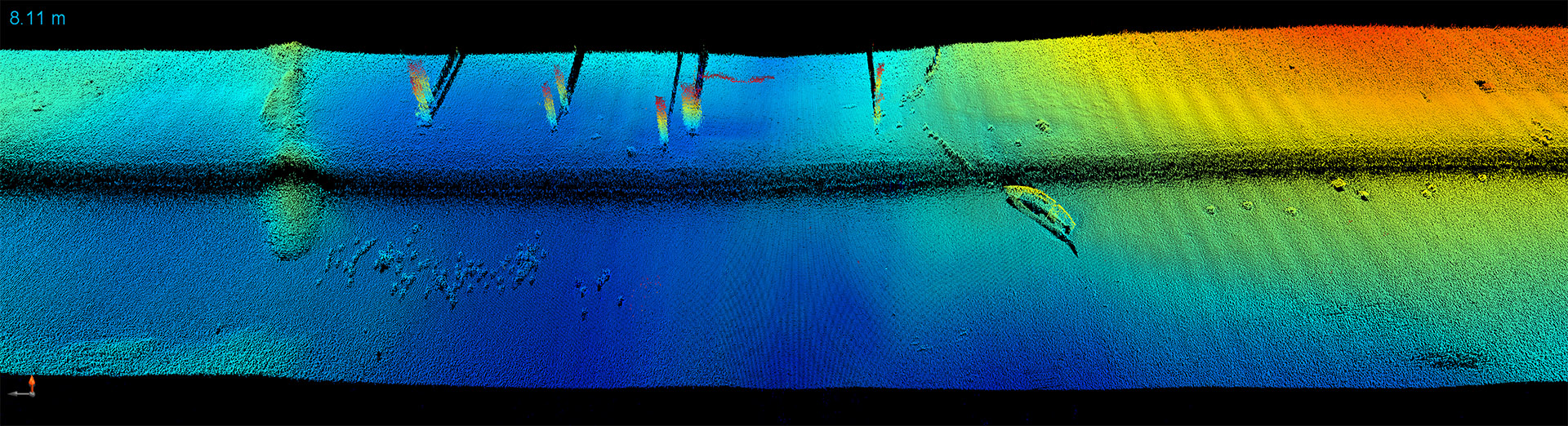
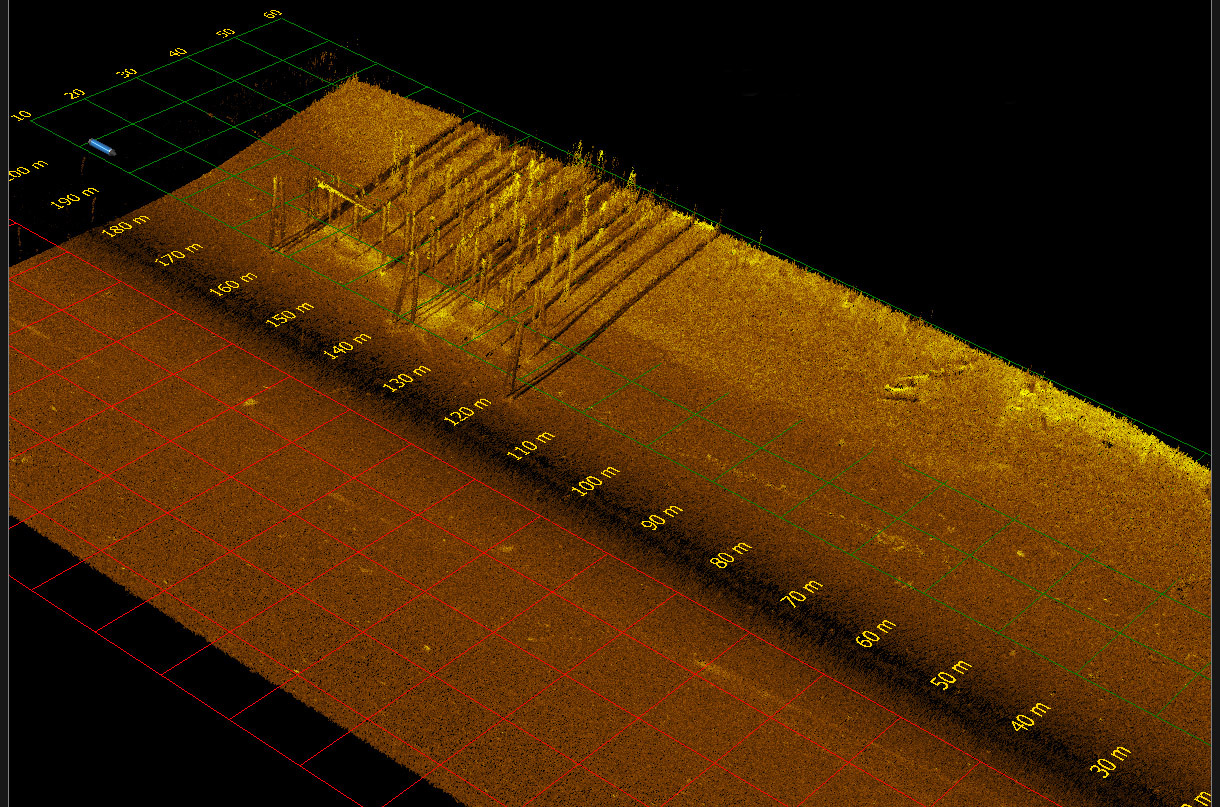
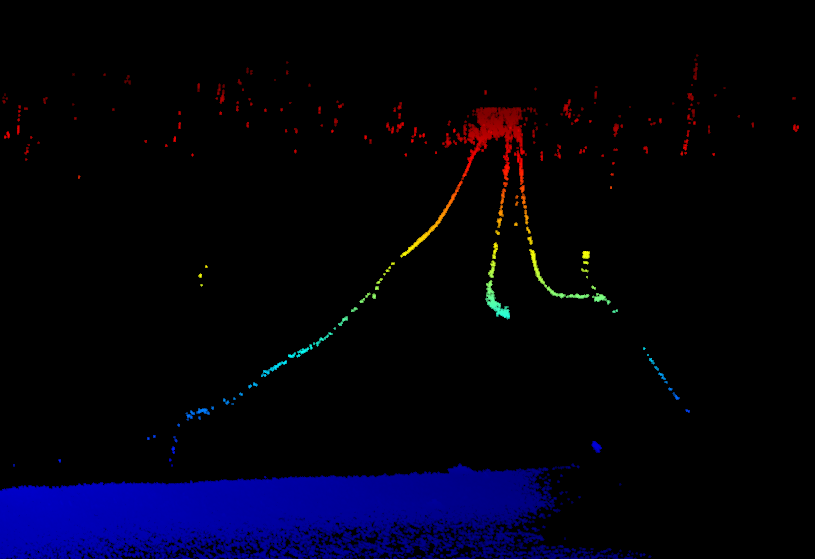
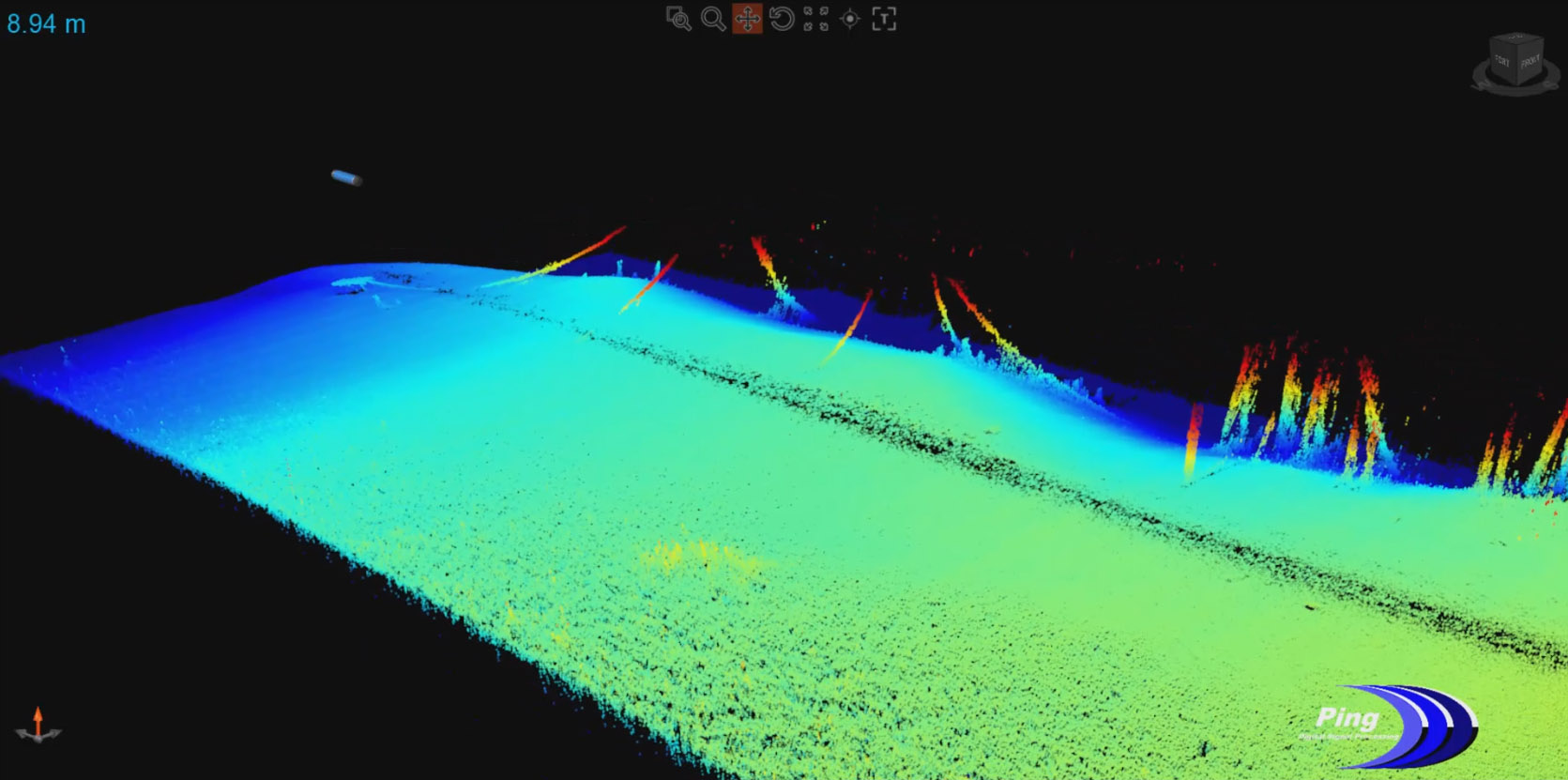
In addition to bathymetry, geometrically correct 3D imagery from the 3DSS-DX-450 ensures that all potential hazards and/or objects of interest are identified from a safe distance. Real-time imagery data can also be colorized by backscatter or by depth to guide survey planning near hazards. These views also provide finescale bathymetry and texture information that differentiates seabed composition types.
Resolving Small Features and Targets
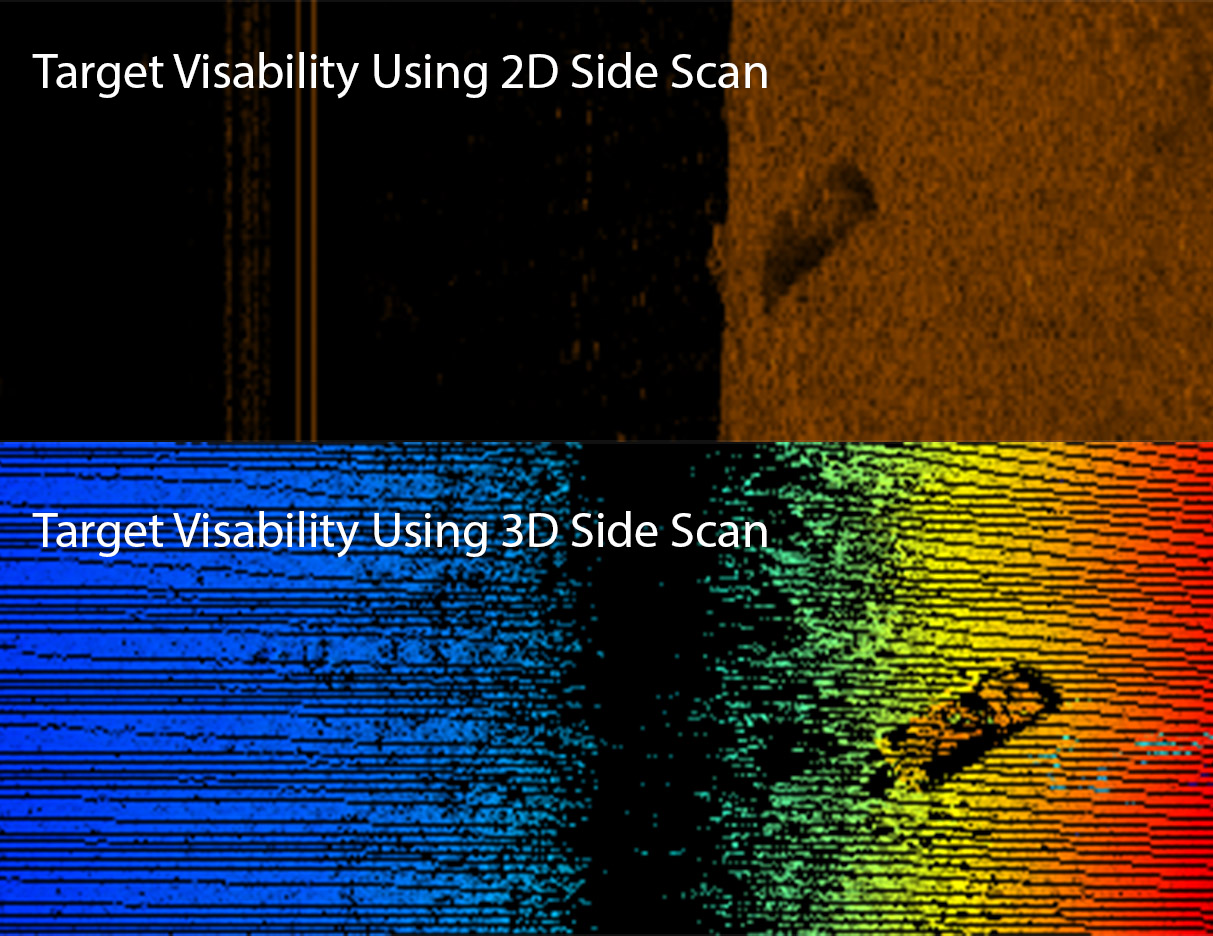
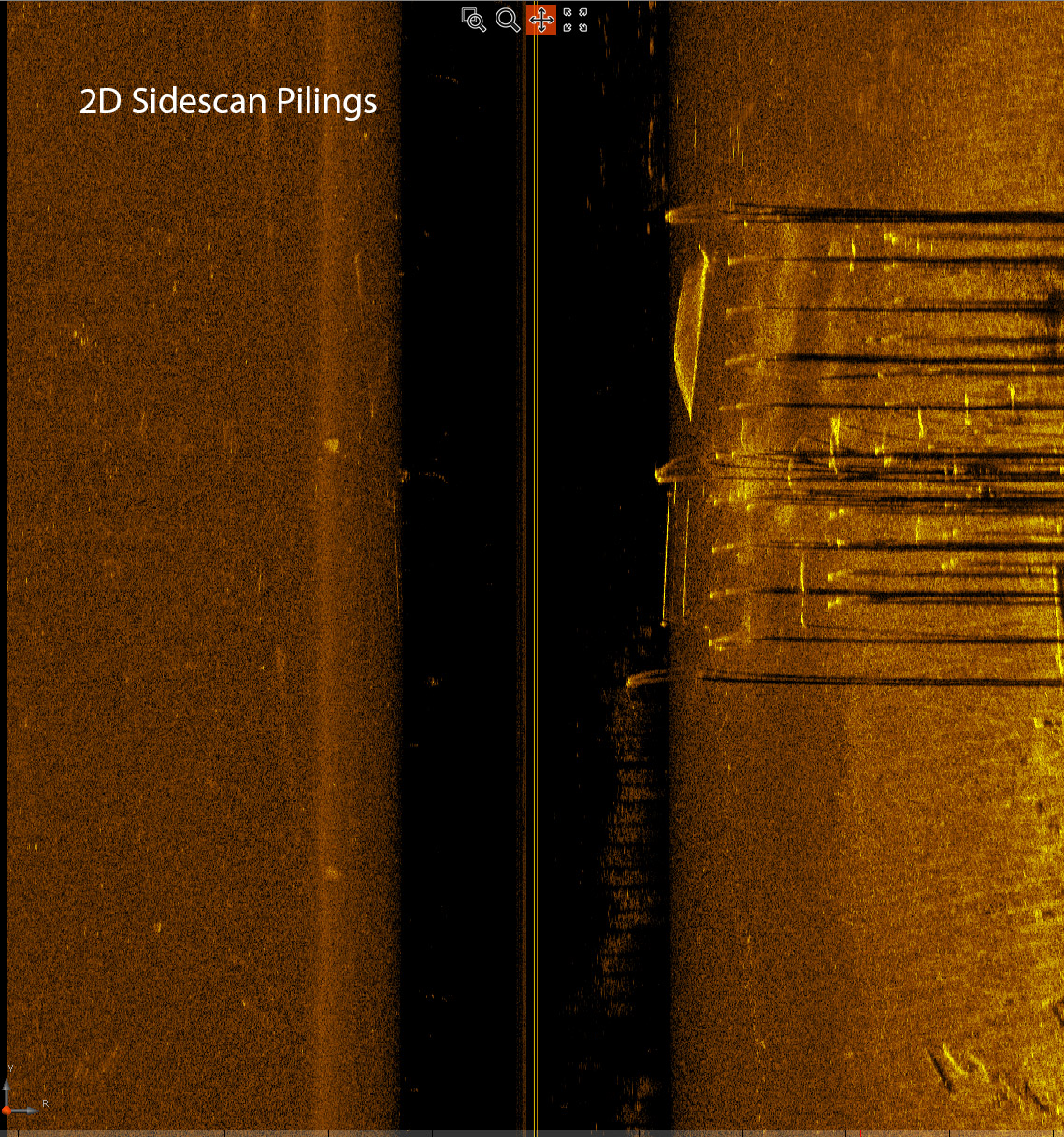
Hydrographic surveys are often required to resolve significant objects or hazards on the seabed. The Special Order IHO Standard specifies that a 1m cubed target must be resolved. Multibeam echosounder surveys however do not easily detect these targets and sidescan sonar is recommended in the IHO, CHS and LINZ standards to ensure that these targets are identified. Conventional sidescan cannot provide direct height information for identified targets and requires a second survey. The high resolution bathymetry and 3D imagery of the 3DSS-DX-450 sonar allows fine scale bathymetry and small targets to be identified and measured directly.

Third Party Hardware and Software

For the highest accuracy hydrographic surveys, the 3DSS-DX-450 can be easily augmented with a dual antenna GNSS, an external MRU or INS system, and a sound velocity sensor. Almost all manufacturers are supported including advanced INS systems such as those from SBG Systems and Applanix. Many different hardware combinations are already in use.
The 3DSS-DX-450 is also directly supported with real-time data acquisition drivers for almost all industry standard survey software products including; Hypack, QINSy, SonarWiz, and PDS2000. Post processing software such as Teledyne Caris HIPS/SIPS and QPS Chimera are also fully supported.